|
|
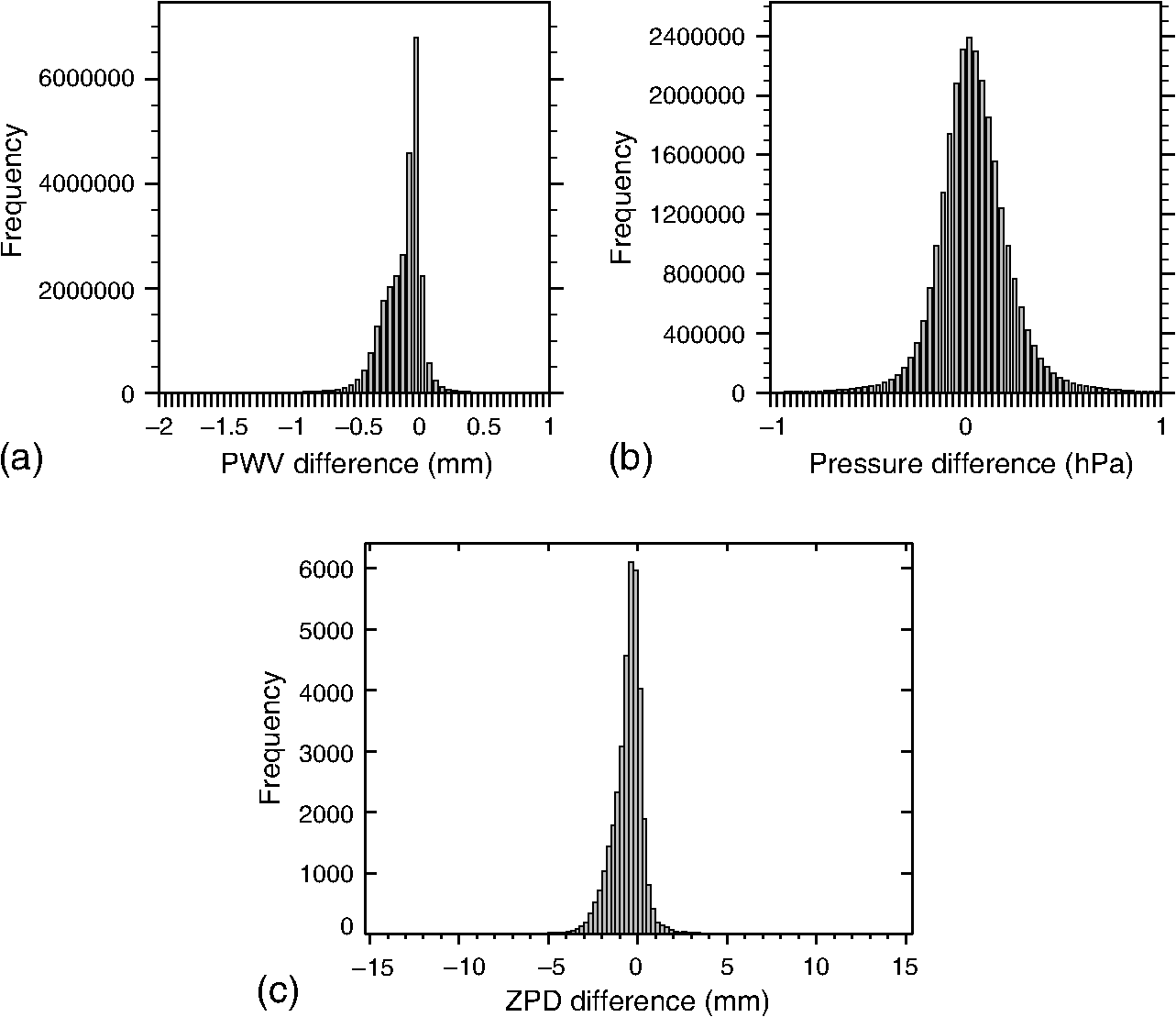
1.IntroductionSynthetic aperture radar is a popular remote sensing technique for observing Earth’s surface. The strength of a signal, which is scattered back, is independent of the actual weather condition, whereas the wave propagation velocity depends on water vapor, pressure, and temperature.1 Differential interferometric synthetic aperture radar (DInSAR) images are made from subtracted phase information from two synthetic aperture radar acquisitions and, therefore, are affected by weather changes. This spatial effect on the phases is known as the atmospheric phase screen (APS). Also affected is the absolute ranging technique, which considers the total delay of the waves instead of the phase.2 In recent years, numerical weather predictions (NWPs) have become state-of-the-art in mitigating the atmospheric delays independent of the radar data. Different authors successfully demonstrated the mitigation of the APS using NWP for deformation estimation.3–7 Similar to DInSAR, the delay correction using NWPs is also beneficial for the absolute ranging technique to estimate displacement maps.8 Cong et al.9 demonstrated a straightforward technique by using exclusively the European Centre for Medium-Range Weather Forecasts reanalysis (ECMWF ERA-interim) data, which are also used for the NWP initialization in this work. In comparison to this technique, the model-based prediction technique enables the physical interpolation between time steps. In case of ECMWF ERA-interim data, the time sampling is 6 h and a prediction interpolates temporally as well as spatially in a physically correct way. Input weather data of a prediction are commonly of coarse resolution, and in this example it is 0.75 deg, which is . Therefore, the initial data must be spatially interpolated for higher resolutions. This interpolation is physically unbalanced, as NWP needs prediction lead time to stabilize.10 This time is called spin-up time. The weather research and forecasting (WRF) model measures this imbalance by the diagnostic variable dpsdt, which is the domain averaged surface pressure tendency. This variable converges with further integration duration against a stable value, which represents the balanced state (see Fig. 2 at the end of this work). The imbalance disturbs the precipitation forecast at the first prediction hours.11 This wrongly predicted precipitation disturbs the water vapor distribution, which causes zenith path delay (ZPD) prediction distortions, respectively. The digital filtering initialization (DFI) technique reduces this undesirable behavior11–13 by integrating backward and/or forward in time, and removes nonphysical high frequencies by using a digital filter.10 This is particularly helpful for time-critical applications to save computational time. The DFI accuracy gain for ZPD predictions is unknown. Similar to SAR acquisitions, Global Navigation Satellite System (GNSS)-measured time delays are also affected by the atmosphere and are very accurate and well investigated.14–16 They provide the ground truth ZPD time series (), because the best agreement between different approaches was achieved by the GNSS and the very long baseline interferometry (with a mean bias of and a standard deviation of 5.1 mm).15 For the accuracy gain investigation, the sample mean and the sample standard deviation of the residuals are computed, where is the predicted ZPD. The sample means and the sample standard deviations from residues () of WRF running with and without DFI are then compared. The objective of this paper is to investigate the accuracy gain of delay predictions derived by the DFI technique, exemplarily at the test site in Germany. 2.MethodsThe ground truth in this work is provided by 233 GNSS stations mainly in Germany, their locations are displayed in Fig. 1(b). E-GVAP17 provides the corresponding ZPD time series () which were processed by GeoForschungsZentrum. Related to the GNSS time series, the WRF prediction data set consists of 44 predictions with and without DFI. The NWP dates are in-between 14 August, 2011, and 20 June, 2013. All 6-h predictions were initialized at 12 o’clock GMT, have a horizontal resolution of 2.7 km, and cover Germany. This is illustrated by the domain d02 in Fig. 1(a). ECMWF ERA-interim data18 with 0.75 deg resolution and 6-h time sampling were used as initialization data. The well-tested parameterization in Chapter 5 of the WRF User’s Guide was used.19 The actual three-dimensional state of the simulated atmosphere was sampled correspondingly to the ground truth . A predicted ZPD time series with a time lag of 15 min was finally derived. This was achieved by the following integration, whereby the temperature as well as the water vapor data were trilinearly interpolated within the grid cells. For pressure, the horizontal data were bilinearly interpolated and, finally, exponentially interpolated in the vertical direction. The predicted ZPD at time was computed by where where is the pressure, is the partial pressure of water vapor, is the temperature, and is the position of 80 km above the GNSS station location . The contribution above 80 km is negligible, because at higher altitudes (higher than 6 km) there is hardly any water vapor present, and pressure decreases exponentially. Used coefficients are , , and , and are derived by Rüeger.20The sample means and the sample standard deviations of the residuals are computed twice, one with and one without DFI. Respectively, both are compared for the accuracy gain investigation. That the DFI technique is useful for the ZPD prediction follows on from the fact that the DFI technique allows a more realistic initialization of cloud water content, precipitation, and vertical velocity fields.11–13 The threat score, which is a measure for correctly predicted precipitation, is better if DFI is used.13 Since precipitation affects the water vapor distribution, it also affects the ZPD prediction and the related residuals. Correspondingly, the DFI technique reduces the residual , which is shown in the following Sec. 3.1. 3.ResultsThe accuracy gain investigation of the DFI ZPD prediction is divided into two parts. First, the accuracy gain is derived; second, the significance of the statistics is shown. 3.1.Accuracy Gain InvestigationWRF predictions without DFI are affected more by physical imbalances in comparison to WRF predictions with DFI.10,12,13 For the DFI predictions, 1-h backward integration, forward integration, and a Dolph filter () setting were used. The imbalance is measured by the diagnostic variable dpsdt and is averaged over the 44 WRF (version 3.5) predictions at different dates without DFI () and with DFI (). Corresponding pressure tendency functions are shown in Fig. 2. The dashed line corresponds to WRF predictions with DFI and converges quickly against a stable value which represents the balanced state. In comparison, the solid line, which corresponds to the WRF predictions with common initialization, converges more slowly. Finally, both functions come close together at the fourth hour of the prediction. This point illustrates the average pressure tendency spin-up time of predictions without DFI. The following accuracy gain investigation is divided into three parts. First, it is shown that the DFI results in a higher water vapor concentration than that of the common initialization. Second, it is shown that this DFI characteristic leads to higher ZPD predictions and, third, that this results in a lower ZPD bias. 3.1.1.Digital filtering initialization effect on the water vapor concentrationIt is known that WRF predicts too wet forecasts during the first 6 h of integration.21 It is also known that the threat score of precipitation forecasts is better if the DFI is used instead of the common initialization.13 In other words, the precipitation forecasts get better if the DFI is used instead of the common initialization. After the initialization, the model builds up clouds, i.e., water vapor condenses. The common initialization results in a higher cloud density and, correspondingly, in a lower water vapor concentration than the DFI. This is illustrated by the histogram in Fig. 3(a). Therefore, the precipitable water vapor (PWV) differences of the first prediction hour are computed, where and are the PWV data from the common and the DFI technique, respectively. This histogram shows that the PWV is mostly slightly larger than (), because is mainly negative and close to zero. In other words, the DFI results mainly in higher water vapor concentrations than those of the common initialization. 3.1.2.Digital filtering initialization effect on the zenith path delay predictionThe ZPD can be divided into a hydrostatic and wet component by where is related to the first term and to the next two terms in Eq. (2). Thereby, is related to the PWV by the rule of thumb16 Since is mainly valid and because of Eq. (4), is mainly valid, where and are the wet ZPD components of the common and the DFI technique, respectively. Additionally, the hydrostatic component can be approximated by22,23 where , and is the surface pressure in hPa. Similar to , the surface pressure difference is computed, where and are related to the common initialization and the DFI, respectively. The corresponding histogram is shown in Fig. 3(b) and displays a centered Gaussian distribution with variance of . Correspondingly, the hydrostatic ZPD change due to the DFI technique is negligible because of the tiny variance and Eq. (5). Consequently, the ZPD delay differences , where and are related to the common initialization and the DFI, respectively, result mainly from PWV differences . Therefore, the histogram in Fig. 3(c) has the same shape as the histogram in Fig. 3(a), and is mainly valid. In other words, the DFI ZPD predictions are inclined toward larger values than the common ZPD predictions.3.1.3.Digital filtering initialization effect on the biased zenith path delay predictionUp to now, it has been shown that the DFI prevents a stronger condensation of water vapor than that of the common initialization, and results mainly in a higher ZPD prediction. The following shows that the structural higher DFI ZPD prediction reduces the bias of common ZPD prediction. Therefore, the residual sample means are shown in Fig. 4(a) depending on the forecast duration. The DFI sample mean is about 13% better than its counterpart during the first hour. This means that the bias is reduced if the DFI is used instead of the common initialization. This is also illustrated by the residual histogram in Fig. 4(b). The gray-colored histogram corresponds to the common initialization and the over-plotted histogram to the DFI technique. This shows that the gray histogram is more negatively biased than the over-plotted histogram. Fig. 4(a) The mean and standard deviation of the residual with respect to the integration hour and (b) the histogram of them for the first hour.  I do not compare the sample mean and standard deviation in time, because the accuracy is related to a time of day which influences the prediction accuracy. This is because heating or cooling effects are differently well presented relative to the time of day by WRF. 3.2.Significance of the Bias DifferenceThe following describes the significance of the sample means related to the first integration hour in Fig. 4(a). Commonly, the sample means are close to the real means. This is expressed by a confidence interval around the sample mean that contains the real mean. Unfortunately, this is only true for a given confidence level (), i.e., in of test cases the confidence interval does not include the real mean. The confidence interval is given by where , , , and are the sample mean, the sample standard deviation, the count of observations, and the -quantile of the standard normal distribution, respectively. In Fig. 4(a), there is for the first integration hour, and at least observations were available. For the superset of the confidence interval , a confidence level of is assumed. In doing so, . The confidence intervals are illustrated by bars in Fig. 4(a). The real means are distinct because the confidence intervals do not overlap. Therefore, the difference is significant.4.DiscussionThe ZPD bias reduction indicates a bias reduction with respect to the precipitation forecast. After the fourth hour of the prediction time, the accuracy gain of the DFI technique is vanished, which states that the precipitation forecast quality is then the same for both. Correspondingly, if the time of interest is from 4 to 6 or 10 to 12 either a.m. or p.m. GMT, then the DFI technique is not beneficial for the ZPD and precipitation prediction, because the ERA-interim time sampling is 6 h and starts at midnight GMT. In contrast to the means, the standard deviations in Fig. 4(a) of the DFI and the common initialization are close together. This means that the bias of the precipitation forecast is reduced but the uncertainty with respect to precipitation remains the same. 5.ConclusionThe objective is to investigate the accuracy gain of predicted ZPDs by using the DFI technique at the test site in Germany. Finally, the following three implications are derived. First, the considered experiment confirms that the DFI technique improves the precipitation forecast because the negative bias of the residual is reduced. Second, the accuracy gain of the DFI is a 13% bias reduction of the ZPD prediction. Correspondingly, the biased position estimates, using the absolute ranging and the ZPD prediction technique, improve if the DFI technique is utilized. Third, if the SAR acquisition is from 4 to 6 or 10 to 12 either a.m. or p.m. GMT, then the needed prediction duration is larger than 4 h. Hence, the model is balanced anyway and thus the DFI accuracy gain is invalid. Correspondingly, the common initialization is recommended at that time to save computational time. AcknowledgmentsWe thank E-GVAP, the E-GVAP processing centers, and the GNSS data-owners for accessing the E-GVAP NRT GNSS delay data ( http://egvap.dmi.dk). Further, we thank Professor Dr. Eineder, Professor Dr. Trautmann, and Christian Minet for discussions and proofreading. ReferencesE. K. Smith and S. Weintraub,
“The constants in the equation for atmospheric refractive index at radio frequencies,”
Proc. IRE, 41
(8), 1035
–1037
(1953). http://dx.doi.org/10.1109/JRPROC.1953.274297 Google Scholar
M. Eineder et al.,
“Imaging geodesy–toward centimeter-level ranging accuracy with TerraSAR-X,”
IEEE Trans. Geosci. Remote Sens., 49 661
–671
(2011). http://dx.doi.org/10.1109/TGRS.2010.2060264 IGRSD2 0196-2892 Google Scholar
R. Holley, G. Wadge and M. Zhu,
“New insights into the nature and effects of the water vapour field on InSAR measurements over Etna,”
in Proc. of FRINGE,
(2007). Google Scholar
J. Jung, D. Kim and S. E. Park,
“Correction of atmospheric phase screen in time series InSAR using WRF model for monitoring volcanic activities,”
IEEE Trans. Geosci. Remote Sens., 52 2678
–2689
(2014). http://dx.doi.org/10.1109/TGRS.2013.2264532 IGRSD2 0196-2892 Google Scholar
G. Nico et al.,
“On the use of the WRF model to mitigate tropospheric phase delay effects in SAR interferograms,”
IEEE Trans. Geosci. Remote Sens., 49 4970
–4976
(2011). http://dx.doi.org/10.1109/TGRS.2011.2157511 IGRSD2 0196-2892 Google Scholar
N. Adam,
“Algorithmic PSI improvement in mountainous areas by atmosphere mitigation,”
(2013). Google Scholar
F. G. Ulmer and N. Adam,
“A synergy method to improve ensemble weather predictions and differential SAR interferograms,”
ISPRS J. Photogramm. Remote Sens., 109 98
–107
(2015). http://dx.doi.org/10.1016/j.isprsjprs.2015.09.004 IRSEE9 0924-2716 Google Scholar
N. Yague-Martinez et al.,
“Ground displacement measurement by TerraSAR-X image correlation: the 2011 Tohoku-Oki earthquake,”
IEEE Geosci. Remote Sens. Lett., 9 539
–543
(2012). http://dx.doi.org/10.1109/LGRS.2012.2196020 Google Scholar
X. Cong et al.,
“Centimeter-level ranging accuracy with TerraSAR-X: an update,”
IEEE Geosci. Remote Sens. Lett., 9 948
–952
(2012). http://dx.doi.org/10.1109/LGRS.2012.2187042 Google Scholar
P. Lynch and X. Y. Huang,
“Initialization of the HIRLAM model using a digital filter,”
Mon. Weather Rev., 120 1019
–1034
(1992). http://dx.doi.org/10.1175/1520-0493(1992)120<1019:IOTHMU>2.0.CO;2 MWREAB 0027-0644 Google Scholar
M. Chen and X. Y. Huang,
“Digital filter initialization for MM5,”
Mon. Weather Rev., 134 1222
–1236
(2006). http://dx.doi.org/10.1175/MWR3117.1 MWREAB 0027-0644 Google Scholar
T. Smirnova et al.,
“Implementation and testing of WRF digital filter initialization (DFI) at NOAA/Earth system research laboratory,”
in 23rd Conf. on Weather Analysis and Forecasting/19th Conf. on Numerical Weather Prediction,
(2009). Google Scholar
X. Y. Huang et al.,
“Development of digital filter initialization for WRF and its implementation at IUM,”
in Preprints: 8th Annual WRF Users Workshop,
(2007). Google Scholar
K. Teke et al.,
“Multi-technique comparison of troposphere zenith delays and gradients during CONT08,”
J. Geod., 85
(7), 395
–413
(2011). http://dx.doi.org/10.1007/s00190-010-0434-y JOGEF8 0949-7714 Google Scholar
K. Teke et al.,
“Troposphere delays from space geodetic techniques, water vapor radiometers, and numerical weather models over a series of continuous VLBI campaigns,”
J. Geod., 87
(10–12), 981
–1001
(2013). http://dx.doi.org/10.1007/s00190-013-0662-z JOGEF8 0949-7714 Google Scholar
M. Bevis et al.,
“GPS meteorology: remote sensing of atmospheric water vapor using the global positioning system,”
J. Geophys. Res., 97
(D14), 15787
–15801
(1992). http://dx.doi.org/10.1029/92JD01517 Google Scholar
“EIG EUMETNET GNSS water vapour programme (E-GVAP-II),”
(2010). Google Scholar
D. P. Dee et al.,
“The ERA-interim reanalysis: configuration and performance of the data assimilation system,”
Q. J. R. Meteorol. Soc., 137
(656), 553
–597
(2011). http://dx.doi.org/10.1002/qj.828 QJRMAM 0035-9009 Google Scholar
W. Wang et al.,
“ARW Version 3 modeling system users guide January 2014,”
(2013). Google Scholar
J. M. Rüeger,
“Refractive index formulae for radio waves,”
Washington, D.C
(2002). Google Scholar
I. Jankov et al.,
“Influence of initial conditions on the WRFARW model QPF response to physical parameterization changes,”
Weather Forecasting, 22 501
–519
(2007). http://dx.doi.org/10.1175/WAF998.1 WEFOE3 0882-8156 Google Scholar
W. Gong et al.,
“Performance of the high-resolution atmospheric model HRRR-AK for correcting geodetic observations from spaceborne radars,”
J. Geophys. Res. Atmos., 118
(20), 11,611
–11,624
(2013). http://dx.doi.org/10.1002/2013JD020170 Google Scholar
J. L. Davis et al.,
“Geodesy by radio interfereometry: effects of atmospheric modeling errors on estimates of baseline length,”
Radio Sci., 20 1593
–1607
(1985). http://dx.doi.org/10.1029/RS020i006p01593 RASCAD 0048-6604 Google Scholar
Biography |